|
Developed Systems |
|
NeEWS Lab. Wearable Social Sensors Sensors that quantitavely monitor human social interactions. NeEWS Lab. Solar-IoT for Precision Indoor Agriculture Self-powered Internet of Things for Sensing and Agricultural Data Procerssing. Wearable Network for Physical Posture Monitoring
This project investigates the architecture of a wearable sensor network and a Hidden Markov Model (HMM) processing framework for stochastic identification of body postures and physical contexts. The key idea is to collect multi-modal sensor data from strategically placed wireless sensors over a human subject’s body segments, and to process that using HMM in order to identify the subject’s instantaneous physical context. The key contribution of the proposed multi-modal approach is a significant extension of traditional uni-modal accelerometry in which only the individual body segment movements, without their relative proximities and orientation modalities, is used for physical context identification. Through real-life experiments with body mounted sensors it is demonstrated that while the uni-modal accelerometry can be used for differentiating activity-intensive postures such as walking and running, they are not effective for identification and differentiation between low-activity postures such as sitting, standing, lying down, etc. In the proposed system, three sensor modalities namely acceleration, relative proximity and orientation are used for context identification through Hidden Markov Model (HMM) based stochastic processing. Controlled experiments using human subjects are carried out for evaluating the accuracy of the HMM-identified postures compared to a naïve threshold based mechanism over different human subjects. The project is funded by a grant from the National Instititute of Health. Recent press covering on this project can be found in RFID Journal, MSU State News, MSU News, and MSU College of Engineering. Wireless Body Area Network (WBAN)
This project investigates a series of network protocols in the context of WBANs with resource constraints. The first part explores a novel transmission power assignment mechanism for on-body wireless links formed between severely energy-constrained wearable and implanted sensors. The key idea is to develop a measurement based framework in which the postural position as it pertains to a given wireless link is first inferred based on the measured RF signal strength and packet drops. Then optimal power assignment is done by fitting those measurement results into a model describing the relationship between the assigned power and the resulting signal strength. A closed loop power control mechanism is then added for iterative convergence to the optimal power level as a response to both intra and inters posture body movements. The project also investigates a family of store-and-forward packet routing algorithms for WBANs with frequent postural partitioning. A prototype WBAN has been constructed for experimentally characterizing on-body topology disconnections in the presence of ultra short range radio links, unpredictable RF attenuation, and human postural mobility. Probabilistic and distance vector packet routing protocols are then developed using a stochastic link cost formulation, reflecting postural trends of human body. On the application front, a networked proximity sensing and Hidden Markov Model (HMM) based mechanism that can be applied for stochastic identification of body postures using a WBAN is explored. The idea is to collect relative proximity information between on-body wireless sensors, and then to process that using HMM in order to identify the subject’s body postures. The key novelty of this approach is a departure from the traditional accelerometry based approaches in which the individual body segment movements, rather than their relative proximity, is used for activity monitoring and posture detection. Through experiments with body mounted sensors we are able to demonstrate that while the accelerometry based approaches can be used for differentiating activity intensive postures such as walking and running, they are not very effective for identification and differentiation between low activity postures such as sitting and standing. The protocols developed in this project are currently being used in a number of domain-specific and inter-disciplinary projects involving human interaction and behavior monitoring, physical activity monitoring, and for studying group behavior using Wireless Body Area Networks.
Video Demo: Please watch this video to see our preliminary working prototype of a wearable sensor network.
Wearable Sensor System for Non-caged Hen Monitoring NeEWS Laboratory is working with a team of animal science researchers in MSU to explore the use of new wireless technology to determine its effectiveness in monitoring the welfare of egg-laying chickens. With a grant from the U.S. Department of Agriculture, the researchers are testing wearable sensors that monitor how hens use space and resources in non-cage environments. The lab has developed a hen-mountable wireless sensor system for tracking a hen’s activity profile, including its movement with respect to other hens and fixed items such as nest-boxes, perches and water station. The sensor weighs less than one ounce. Using such a wearable system for bird monitoring will require a number of key engineering innovations, including low-power wireless network protocols, on-body and off-body data fusion models, smart software middleware, and runtime actuation of infrastructure control based on the monitored data. An article on this project can be found in MSU News. Video Demo: Please watch this video to see our preliminary working prototype of the hen monitoring system.
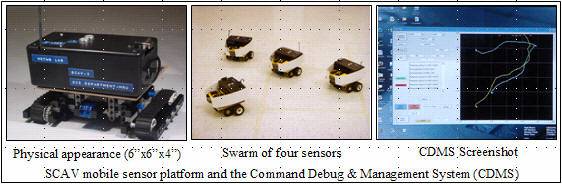
Swarm Capable Autonomous Vehicles (SCAV)
We develop a collaborative target tracking framework, in which distributed mechanisms are developed for tracking multiple mobile targets using a team of networked unmanned vehicles. Applications of such a networked tracking framework would include detection of multi-agent intrusion, network-assisted attack localization, and other collaborative search scenarios. The key idea of the framework is to design distributed algorithms that can be executed by tracking entities using a mobile ad hoc network. In addition to simulation studies, the developed tracking algorithms in this project are implemented and validated using a fleet of Swarm Capable Autonomous Vehicle (SCAV) system that is developed in our laboratory.
A test-bed of networked micro-robotic vehicles has been developed in our laboratory for carrying out mobile Ad Hoc and sensor network protocol research. As shown in the picture below, the SCAV platform has been developed as a 6"x6"x4" micro-robotic sensor system with the following capabilities:
- Self-localization at centimeter resolution within an in-laboratory reference coordinate system
- Both Ad Hoc and infrastructure based wireless communication
- Wireless networking using CSMA and AODV as the MAC and the routing layer protocols
- Autonomous navigation using Kalman Filter and the localization system
- Collision avoidance using infra-red obstruction sensing
- Multi-modal onboard sensing including acceleration, temperature, magnetic field, light, and sound
- Remote debugging, command control, visualization and software download over wireless
Demo Video: This video demonstrates the SCAV system and its applications including collaborative mobile sensing, networked target tracking, and Kalman filtered navigation. The video also shows real-time CDMS view for all the applications. To learn more about the project please download this paper.
Ecological Acoustic Sensor Network (ECSN)
System Architecture: In collaboration with MSU's Computational Ecology and Visualization laboratory, we are developing a scalable ecological sensor network with sensor platforms, networks, field servers, regional and national repository servers, and web based client/application modules for end users in a fully customizable manner. An end-to-end system architecture that we propose to cater to such functions is depicted in the following Figure.
The lowest tier of the network contains homogeneous ultra-low power nodes that are used for sensing with spatial resolution of the order of 1m to 30m. Data collected at this tier is aggregated by the tier-2 nodes. Tier-2 nodes assume a dual role of aggregation and routing of the tier-1 data as well as performing their own data collection using sensors with spatial resolution of approximately 30m to 500m. Data collected at this tier and that aggregated from the lower tier is routed to a centralized server through the gateway nodes in the data aggregation layer. All sensor data must pass through these gateway nodes in which middleware software, supporting sensor node programming, is located. A sufficient number of redundant gateway nodes are used in order to accomplish reliability. From the network management server, administrators are able to program a sensor node or a group of sensors nodes with a specific sensing schedule. Once programmed, a sensor node can initiate data delivery to the gateway node middleware, which, after implementing required post-processing, can deliver the data to the appropriate repository servers.
System Development: As the tier-1 nodes we use off the shelf MICA2 MOTE processor/radio card and MTS310 MOTE sensor card (both are available from Crossbow Technologies). MICA2 card comprises an ultra low-power 8-bit microcontroller ATmega 128L that run TinyOS nano-kernel with only 4 KB onboard RAM and 128KB program flash memory. The most attractive feature of this card is that it draws only 8mA current in active mode and 15 uA in a supported sleep mode of operation. The card also supports a 400 MHz or 900 MHz band radio communication interface with a transmission power controlled range of up to few hundred feet. Sensor modalities supported by these tier-1 nodes include low resolution acoustics, temperature, light intensity, magnetic field intensity, and two-axis acceleration. While the tier-1 nodes are used for low resolution acoustic sampling and primarily for monitoring ancillary meteorological parameters, high-resolution audio sampling is performed at the tier-2 nodes. Considering the high data volume, on-board processing and heavy-weight communication requirements we decided to develop a high-performance yet relatively low power consuming sensor platform for the tier-2 nodes
As shown in the figure above, the tier-2 sensor platform is designed around the STARGATE single-board computer from Crossbow Technologies. STARGATE has a low-power 400MHz PXA255 processor, 64MB onboard SDRAM, 32Mb flash and general-purpose interface ports. In addition to the processor card, the system comprises several power related and peripheral components including a power supply (5V-12V), wireless card (802.11b), local flash storage (1 Gb), USB multiplexer, a camera, a microphone, a solar panel (18w) and a deep cycle marine 12V battery, weatherproof enclosure and a weatherproof battery box. A MICA2 MOTE processor/radio card is also connected through the 52-pin connector so that the data collected from the tier-1 nodes can be aggregated by the tier-2 habitat sensor platform over 400 MHz or 900 MHz links.
We employ the embedded Linux operating system on STARGATE. Other software modules in the tier-2 sensor include TCP/IP for networking, Telnet and FTP for remote access and diagnostics. Additional networking software for wireless ad hoc routing, clustering, and sensor programming are also implemented in this platform. Since the end-applications often require time-domain correlation analysis of the collected sensor data from multiple sensor platforms, it was mandatory to run a low resolution time synchronization protocol across the tier-2 nodes. We have implemented a millisecond resolution time synchronization protocol to accomplish this. Finally, a visualization tool for network status monitoring and sensor programming has also been developed for management purposes.
Sensor Deployment: To field test the developed sensor platforms, we deployed three site clusters of sensor networks at the MSU Kellogg Biological Station (see the figure below) within the LTER Site to test the described sensor system. Each site was chosen to include different land use types including forest, urban, grassland, agricultural, lake, and wetland. Each site contains several sensor platforms and an associated server that receives sensed data and uploads them to a centralized remote server. Two of the sites (LTER Main Site and Pond Lab Site) were within range of the MSU wireless network cloud and the other site (Bird Sanctuary Site) could not reach the wireless backbone. Data from the Bird Sanctuary Site is manually downloaded and periodically moved through the corresponding server.
Details about the ecological applications of the deployed sensor network can be found at the web site of MSU's Computational Ecology and Visualization laboratory.
MSU ECE Department College of Engineering Contact Us Biswas Home
© 2014 Subir Biswas, All rights reserved.
|